

QDDモータとは
QDDモータとは
QDD(Quasi Direct Drive)モータは、低減速比のギアとモータを組み合わせた構造で、ダイレクトドライブに近い特性を持ちながら、減速による高トルクと制御性を両立する駆動方式です。
現在は主にヒューマノイドロボットやAIロボット分野で[トルク・サイズ・コスト]のちょうどいいモータとして注目されています。

なぜいま注目されているのか
これまでロボット用途でトルクを引き出そうとすると、高速回転するサーボモータにギアとエンコーダをつけて制御することで駆動していました。
しかしこの構成だと安全性やバックラッシによる位置ズレの問題がありました。
そのため、高精度駆動やバックドライバビリティが求められる部位や用途ではダイレクトドライブモータを採用した制御が用いられました。
一躍話題となったBoston Dynamicsの4足歩行ロボットや中国で盛んなヒューマノイドロボット、制御にディープラーニングを採用しているFAロボットなどここ最近のロボットの進化は著しいです。
そんな中、スポットライトが当たったのがQDDモータなのです。
これには技術の進歩もあり、ギアつきでもトルク密度が3〜5倍に向上していたり、90%近い効率を発揮することができるようになっているためです。
それに加え、低減速比ギア搭載のためバックドライブも可能となっています。
スペック比較
DDモータやギア付きサーボモータと比較した場合の特徴を整理します。
| 項目 | ギア付きサーボモータ | DDモータ | QDDモータ |
|---|---|---|---|
| トルク | ◎ | ○ | ◎ |
| バックドライバビリティ | × | ◎ | ◯ |
| 繰り返し精度 | △ | ◎ | △ |
| 中空 | × | ◎ | ○ |
| 応答性 | △ | ◎ | ◯ |
| 制御性 | △ | ◎ | ◯ |
| 停止時の保持力 | ◎ | △ | ◯ |
| 速度ムラ(低速時) | △ | ◎ | ◯ |
| コスト | ◯ | ○ | △ |
| ロボットハンド適性 | ◯ | ◯ | ◎ |
| 最適用途例 | 高負荷の位置決め・搬送 | 高精度回転・大型中空軸 | ロボットハンド・人協調用途 |
ヒューマノイドやロボットハンドを組み立てる上で、コスパを考慮すると2重丸の多いDDモータより、丸の多いQDDの方が最適なスペックを備えている傾向にあります。
QDDモータの魅力は技術のブレイクスルーをもたらしたというより、”用途への高い適合性”を持っているという点にあります。
QDDの実際の採用シーン
- ・検査装置の回転軸(高精度・低振動)
- ・搬送装置(高トルク・コンパクト設計)
- ・医療・リハビリ機器(安全性・滑らかな動作)
- ・ロボット関節(協働ロボット・研究用途・ヒューマノイドや4足歩行)
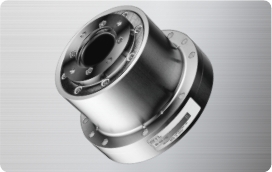
MTLのQDD
MTLでは、小型DDモータの技術をベースに、低減速比ギアを組み合わせたQDDタイプも取り扱いしています。
用途に応じたトルク設計や中空構造との組み合わせにより、柔軟なシステム構築が可能です。
また、日本国内での生産のため、比較的単納期でモータをお届けできます。

QDDモータはトルクに注目されがちですが、実際にはベースとなるモータ性能や構造設計によって大きく差が出ます。
MTLでは、小型ダイレクトドライブモータで培った技術をベースに、実用性の高いQDDモータを提供しています。
①DDベース設計による高い制御性
もともと高精度用途に使われるDDモータのノウハウがベースとなっているため、ギア付きでも安定した位置決めとなめらかな動作が可能です。
②中空構造による設計自由度向上
配線・配管を通すことができる中空構造によりロボット関節や装置内部への組み込みがしやすく、設計の自由度を高めます。
③用途に応じたトルク設計・カスタム対応
研究用途や装置開発など要求仕様が固まっていない段階からでも最適な構成を提案可能です。
さらに当社のμDD(マイクロDDモータ)は、
単なるDD化にとどまらず、精密制御に特化した設計を行っています。
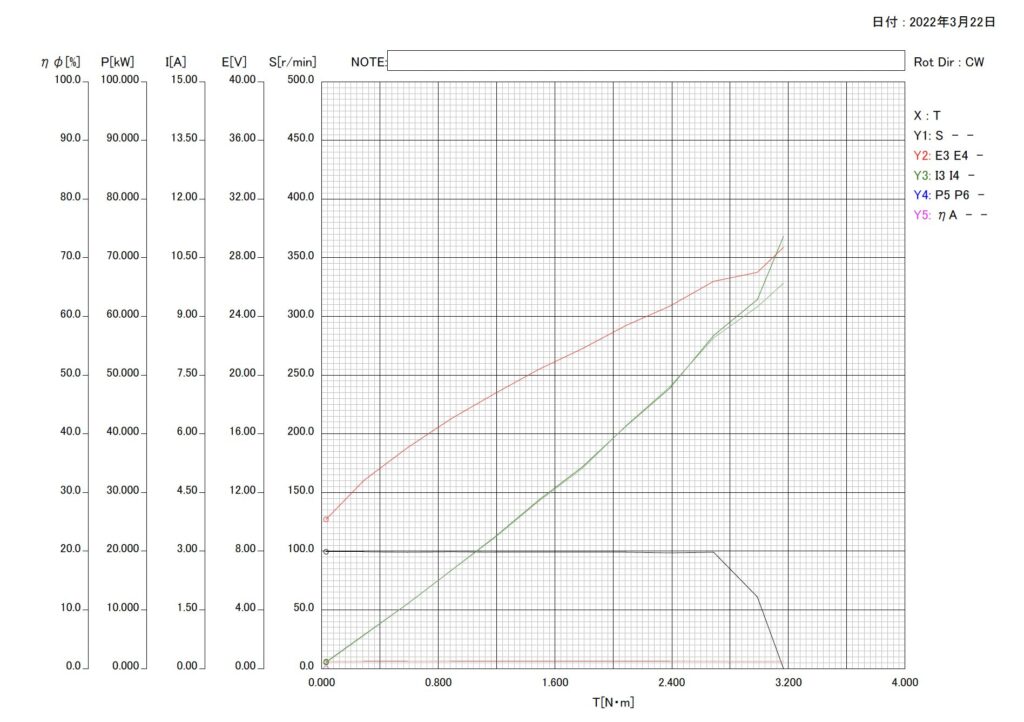
特に重要な特長の一つが、電流値とトルクの高いリニアリティ(直線性)です。
一般的なモータでは、摩擦やコギング、構造誤差の影響により、「指令電流に対してトルクが素直に出ない」領域が存在します。
これに対しμDDは、構造最適化および高精度エンコーダとの組み合わせにより、
・指令電流に対してトルクが比例的に出力される
・極低速域でも安定した制御が可能
・微小な力制御やトルク制御の再現性が高い
以上の特長を持つため、”QDD化しても高度なセンシング”が可能となっています。
採用事例
◯ロボットアーム関節(協働ロボット・研究用途)
ヒューマノイドロボットの肩関節にQDDタイプを使用。
およそ2キログラムのアームを±10μmで制御可能。
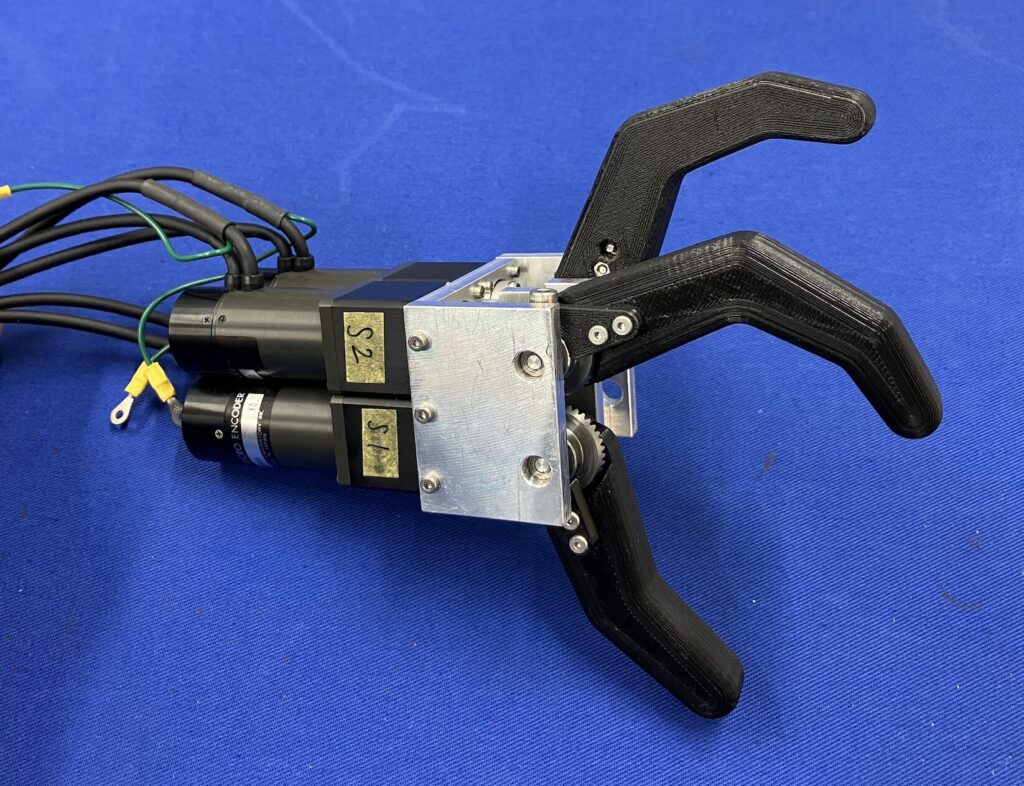
◯ロボットハンド
ギアレスでは持てなかった重量も減速することで把持可能に。
低減速でバックドライブするので、力覚フィードバック制御も可能。
回転軸はハプティックや力制御で使用する際にも有利な高剛性軸となっており、中継部品を削減してワークに接触できます。
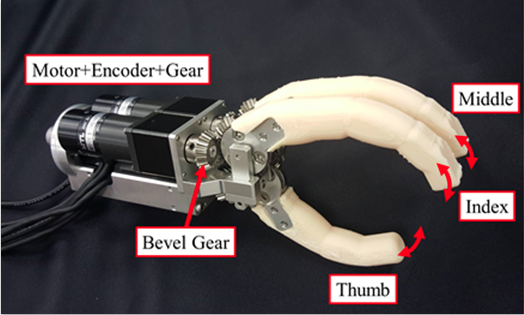
◯リアルハプティクス義手
上記ロボットハンドを義手として使用できるようカスタマイズ。
力加減を備えた繊細な動作が可能になります。(採用ページへ)
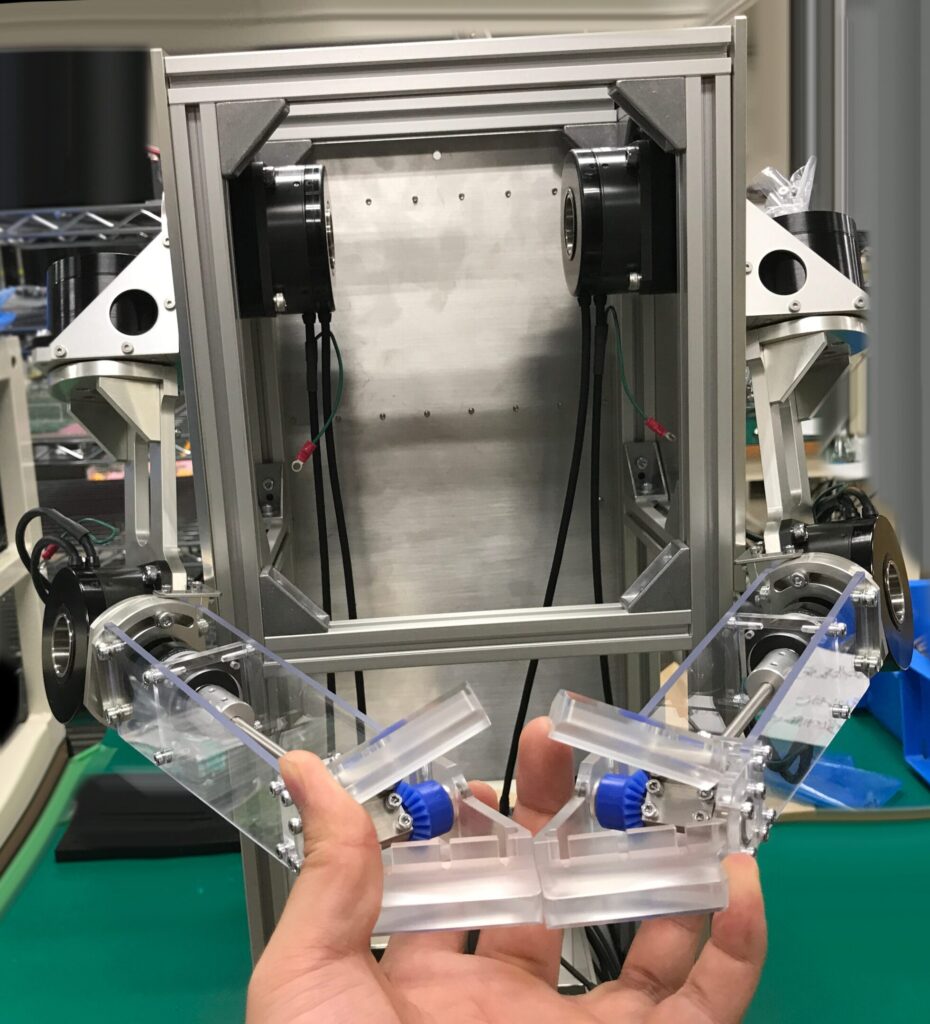
◯GP-Arm
GP-Arm(General Purpose Arm)は身体感覚を伝送可能な双腕型ロボットです。
人間の代替として産業、家庭、福祉介護、医療、農業など、人手や手間暇のかかる分野の自動化、省力化、そして人間と協調した作業での活用が期待されます。(採用ページへ)

ご相談・技術サポート
構想段階からのご相談も歓迎しています。
「どの方式が適しているか分からない」「必要トルクの目安を知りたい」といった段階でも問題ありません。
- ・用途に応じたモータ選定(サイズ / 中空 / QDD )
- ・イナーシャの簡易試算
- ・既存構成との比較検討
まずはお気軽にお問い合わせください。
関連記事
DDモータとは
•そもそもダイレクトドライブモータとは
中空モータとは
•中空モータはなぜメリットが多いと言われるのか
リアルハプティクスハンド
•DDモータのみでロボットハンドを作成すると何ができるのか




