
リニアアクチュエータを用いたせん断力測定およびフィードバック機構の開発
―介護現場のオートメーション化
1)マスター・スレーブ制御
マスター(右)を動かすと、同様の動きをスレーブ(左)側が時差約10μsecにて追従して動作します。
マスターのエンコーダパルスをスレーブ側へ位置入力
(2)反力検出及びフィードバック
スレーブ側に外力が加わった場合、マスター側に反力としてフィードバックされます。(例)スレーブ軸にて輪ゴムを引くと、輪ゴムが伸び徐々に抵抗が掛かる様子をマスター側で擬似的に感じることができます。
位置偏差アナログモニタ出力をマスター側へアナログ入力
(3) セーフティアラーム機能
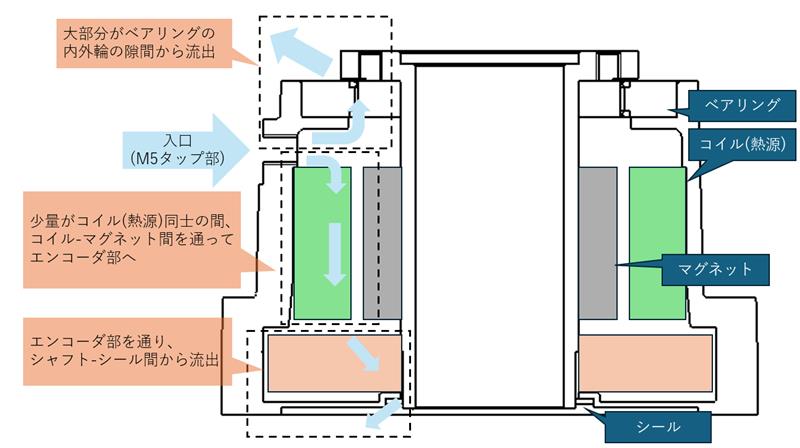
スレーブ側に設定した以上の外力が加わると、アラーム出力を行いサーボオフして、安全に停止します。スレーブ軸での強い接触事故を防ぎ、モータの焼損を防ぎます。中空軸タイプのダイレクトドライブモータを採用し、中空軸内にケーブルを通すことでコンパクトなロボットを製作しました。
| Model name | Product name | Remarks | |
| 1 | MDH-2018-36KE(指部) | 超小型中空ダイレクトドライブモータ | 外径φ21mm、中空内径φ2.6mm 分解能144,000C/R ピークトルク130mNm |
| 2 | MDH-4006-324KE(手首) | 小型中空ダイレクトドライブモータ | 外径φ40mm、中空径φ6mm 分解能1,296,000C/R ピークトルク0.3Nm |
| 3 | MDH(12)-4018-324KE(肘) | 小型中空大口径 ダイレクトドライブモータ | 外径φ40mm、中空径φ12mm 分解能1,296,000C/R ピークトルク1Nm |