
EtherCAT®対応 小型サーボドライバ

EtherCAT®はBeckhoff Automation GmbHの登録商標です。
EtherCAT対応 小型サーボドライバ プレリリース開始
世界最小から最大φ100のDDモータを動かすためのドライバにEtherCAT対応モデルが登場しました。
これからの開発にぜひご活用ください。
特徴
高速性と高精度同期性を兼ね備えたEtherCATで、応答性と繰り返し精度が良好なDDモータの制御が可能になりました。
用途
1. 高精度な位置決め・同期制御
・ 1軸以上の同期制御(例:複数のモータを同期させる必要があるシステム)
・ 加速器・光学実験装置(ミクロン単位の精密位置決め)
・ マルチアクシスモーション制御(ロボットや自動組立機の軸制御)
2. 半導体・精密機器分野
・ ウエハーステージの位置決め(半導体製造装置のウエハー搬送やアライメント)
・ 電子部品実装機(チップマウンター)(プリント基板への精密部品配置)
・ 光学検査装置・レーザーマーカー(精密な走査・検査工程)
3. ロボット
・ アームの高精度回転制御(協働ロボットの手首関節や回転テーブル)
・ 6軸以上の多関節ロボットの同期制御(EtherCATによるリアルタイム通信で制御)
・ 手術支援ロボットの制御(微細な動きを制御するための高精度モータ)
外形寸法図
MC-200-7220B ※外形はMC-200全型式共通

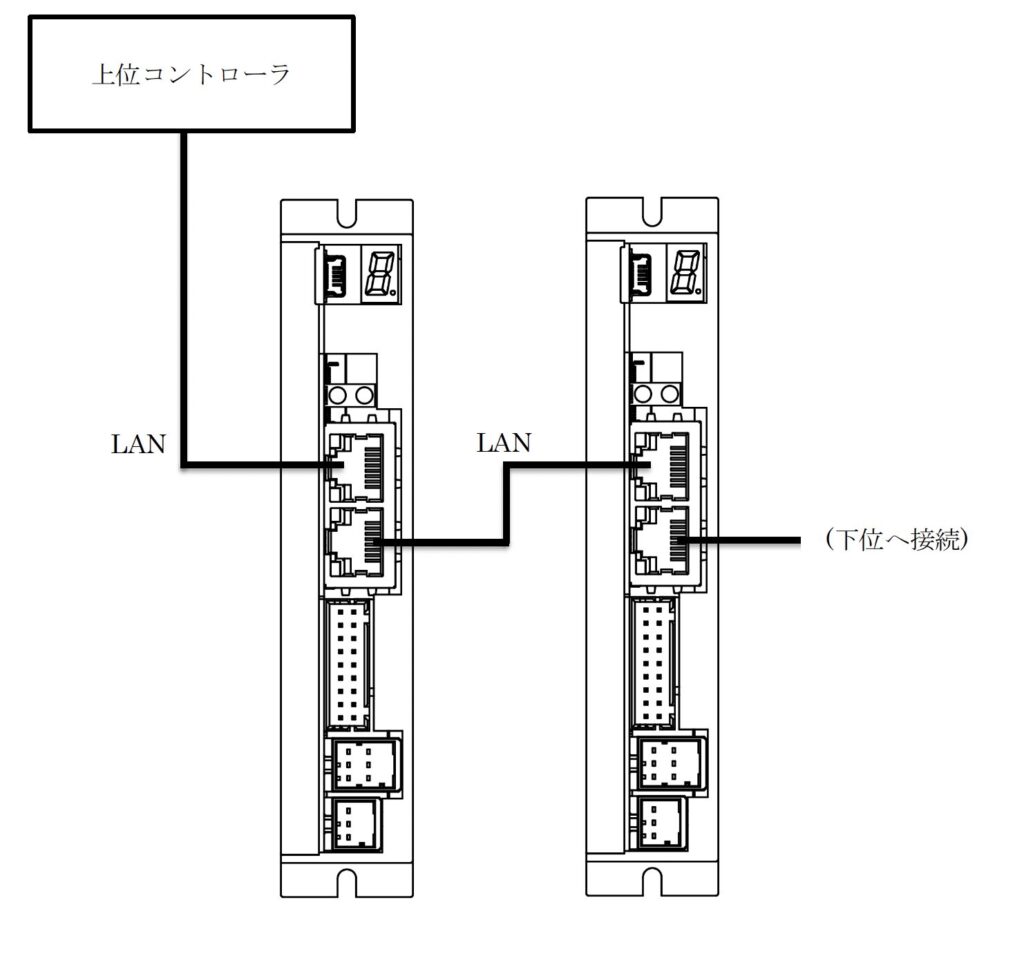
接続イメージ
制御方法のご案内
MC-200BシリーズをPCやTwinCATで制御する方法についての詳細は、以下のリンクよりご確認ください。
TwinCATにて制御される場合
μDDモータを動かすためのESIファイルはこちらからダウンロードできます。 2024.2.15
会員専用ダウンロードページに飛びます。
PCで制御される場合
USBケーブルでPCと接続することで制御が可能です。
その際は専用アプリケーション「MTLParam」をご利用ください。
(対応OS Windows10 32bit/64bit)
・各種パラメーターの設定、状況のモニタリング、コマンド制御が可能です。
・プログラム機能により、ドライバのみで各制御コントロール駆動が可能です。