
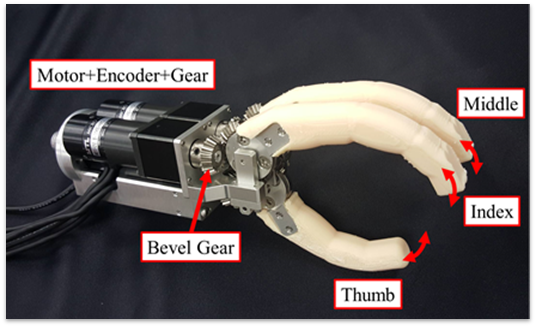
リアルハプティクス義手
失った力触覚知覚機能を代替
ユーザ:慶應義塾大学 野崎研究室
野崎研究室HP HP:http://www.fha.sd.keio.ac.jp/jp/nozaki/nozaki.html
身体感覚の人工再現
掴んだモノの力触覚情報をリアルタイムにデジタル化し、
手以外の身体部位と双方向に力伝達=力触覚移植します。
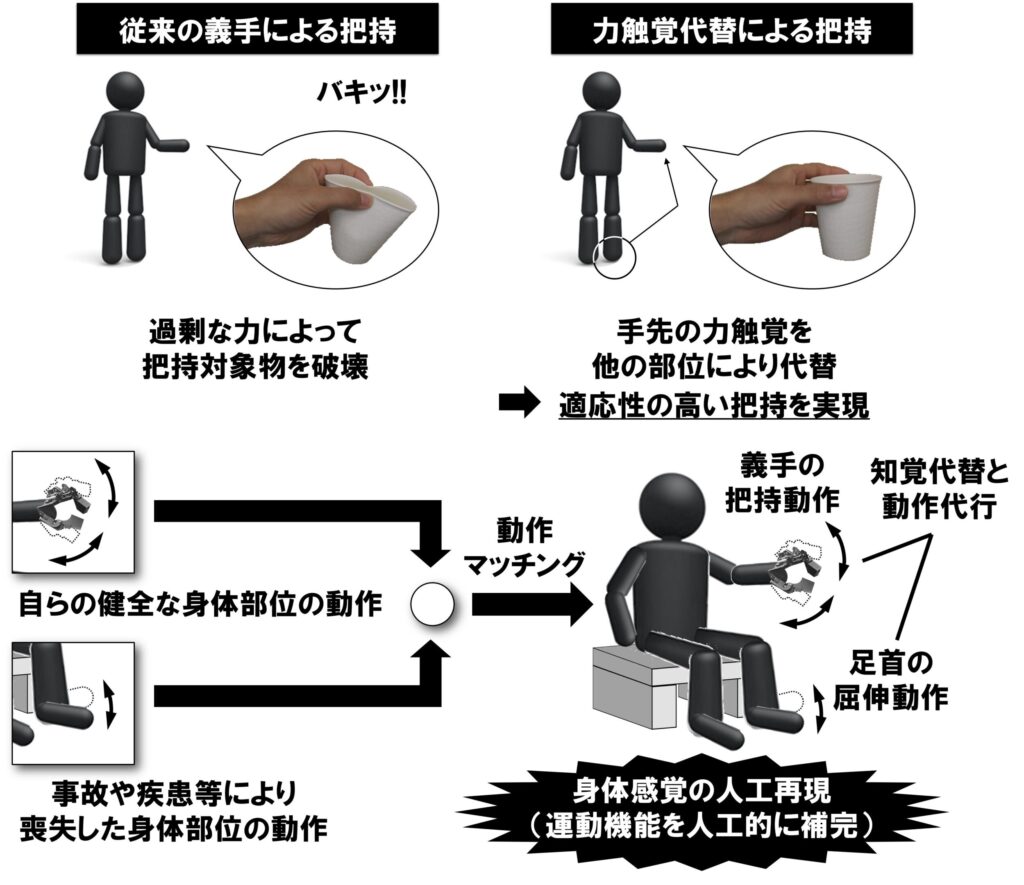
・従来の義手では、接触感覚が伝わらないことで手加減ができず、繊細な作業をすることが困難。
・リアルハプティクス義手では、接触感覚をほかの身体部位で近くできるので直感的で人間らしい行為が可能に!
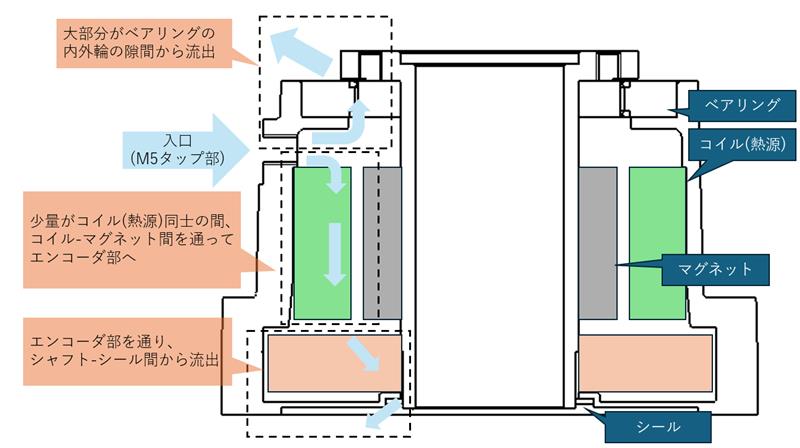
力触覚をリアルに感じるためには、良好なバックドライバビリティを持たせることが重要な課題となります。
減速構造を可能な限り排することが解決策の1つです。
高トルクであるμDDモータを採用し、減速比を小さくすることで、良好なバックドライバビリティを実現することが可能となりました。
採用モータ
| 型式名 | 製品名 | 備考 | |
| 1 | ギア付きMDS-2018-9000E | 中空低減比ギア付μDDモータ | 外径φ21mm 分解能36,000C/R ピークトルク0.84Nm |