

ダイレクトドライブモータによるセンサレス検知・計測の実現— 押し込み荷重制御・接触検知・押し込み剛性測定 —
ダイレクトドライブ (DD) モータを用いて、外部センサなしで接触検知や押し込み剛性測定を行う技術を紹介します。 高分解能・低摩擦・高バックドライバビリティを特長とした MTL の DDモータは、 駆動源としてだけでなく、接触や変位を捉えるセンサとしても活用することができます。
1.概要
一般的に、微小荷重の接触検知や物体の変異測定には、ロードセルや変位センサなどの外部が必要です。
ただし、外部センサの導入は機構設計の煩雑化につながり、装置の小型化や低コスト化を妨げる要因となります。
この課題を解決するために、DDモータ自体をセンサとして活躍するアプローチを提案します。
MTLのDDモータは、高分解能エンコーダ・低摩擦・高バックドライバビリティを特長とします。
接触時のわずかな負荷変化が電流値やエンコーダ位置にリアルタイムで反映されるため、外部センサを追加することなく、DDモータ単体で各種計測が可能となります。
本コラムではDDモータを用いたセンサレス検知・計測の例として、
(1)押し込み荷重の制御、(2)接触検知、(3)押し込み剛性の測定の3つを紹介します。
2.測定方法
本測定で使用したデモ機の構成は図1の通りです。モータは超小型DDモータMDH-2018-36KE等を使用しました。
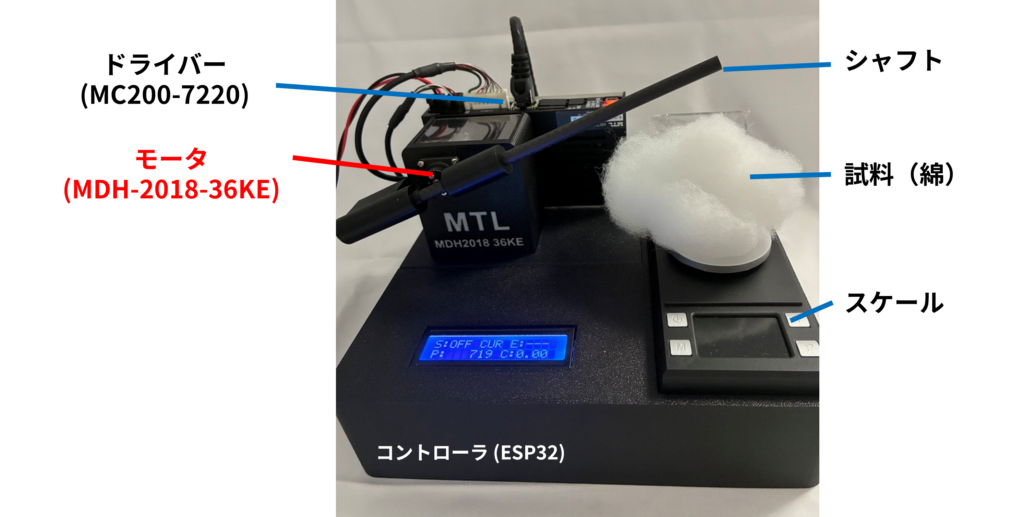
図1 デモ機の構成
2.1 押し込み荷重の制御
電子スケールを用いて、シャフト先端の押し込み荷重と電流の関係を測定しました。
また、本測定から算出した電流値とか中の校正式に基づき、シャフト先端への荷重印加の精度を評価しました。
次項の接触検知のしきい値や押し込み剛性の計算にもこの校正式を使用しています。
電流値 I からシャフト先端荷重 g を換算する校正式:
g : シャフト先端荷重 [g]
a, b : 校正で得た係数(実測の I-g 関係から最小二乗法で決定)
2.2 接触検知
⑴回転中の接触検知
低速で回転するシャフトが静止した試料に触れたときに、接触検知可否を評価しました。
非接触状態で取得した電流値を基準範囲として用い、実測値がこの範囲から外れたとき接触と判明しました。
回転中の接触検知の原理
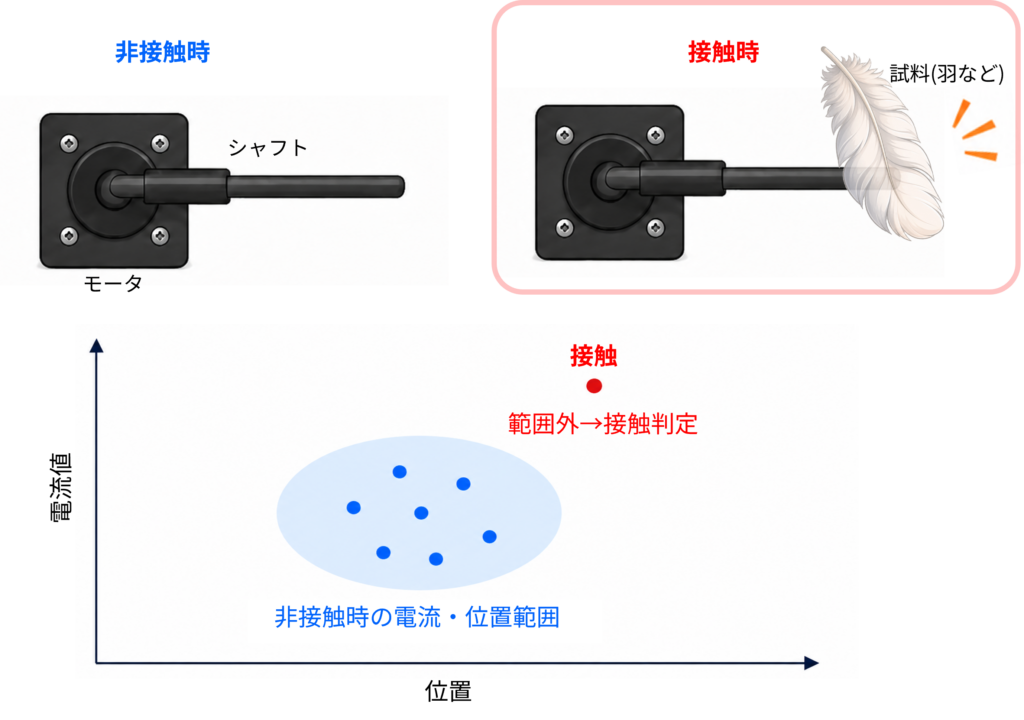
図2 シャフト回転中の接触検知の原理
⑵静止中の接触検知
試料が静止保持したシャフトに触れた時の、接触検知可否を評価しました。
非接触状態で取得した電流値とエンコーダ位置を基準範囲として用い、実測値がこの範囲から外れたときに接触と判定しました。
静止中の接触検知の原理
図3 シャフト静止中の接触検知の原理
2.3 押し込み剛性の測定
一定の指令電流でシャフト先端を試料にお生込んだ際の、荷重と押し込み量から剛性を算出しました。
押し込み荷重は電流値から、押し込み量はエンコーダ位置の変位から取得しました。
※硬さの校正は行なっていないため、Kじゃ絶対的な硬さではなく同一条件かでの試料間の相対比較に用いる「見かけの押し込み剛性」です。
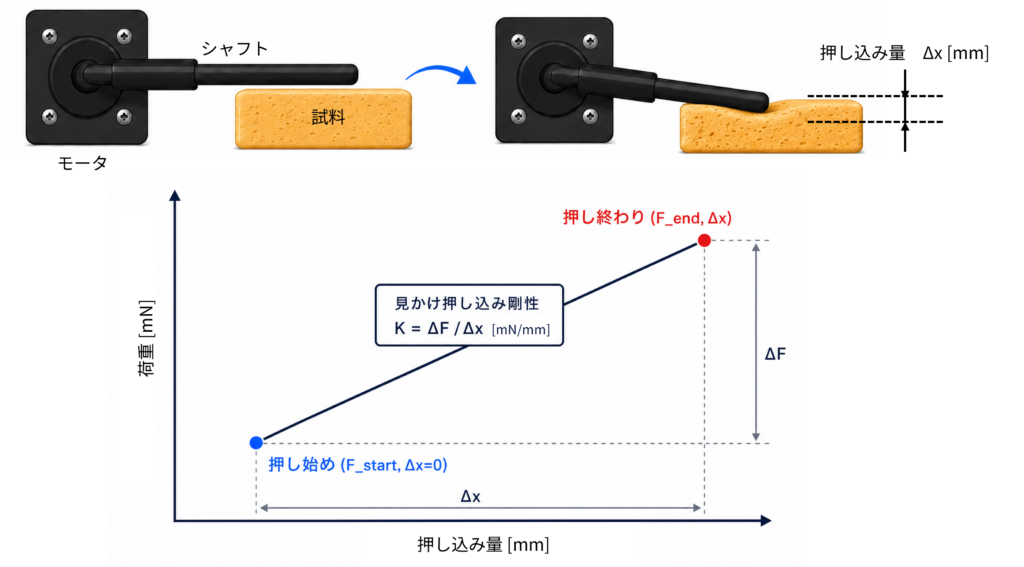
図4 見かけ押し込み剛性Kの算出
押し始め・押し終わりの荷重差と押し込み量から、見かけ押し込み剛性Kを算出する式
Fstart, Fend : 押し始め・押し終わり時点の押し込み荷重 [mN](2.1の校正式で電流値から変換)
Δx : 押し込み量[mm]
3. 測定結果
3.1 押し込み荷重の制御
MDH-2018-36KEを用いて測定した、シャフト先端の押し込み荷重と電流値の関係を図5に示します。
動画1ではこの校正式に基づいて目標荷重をシャフト先端に印加する様子を示しています。
シャフト先端荷重と電流値の関係
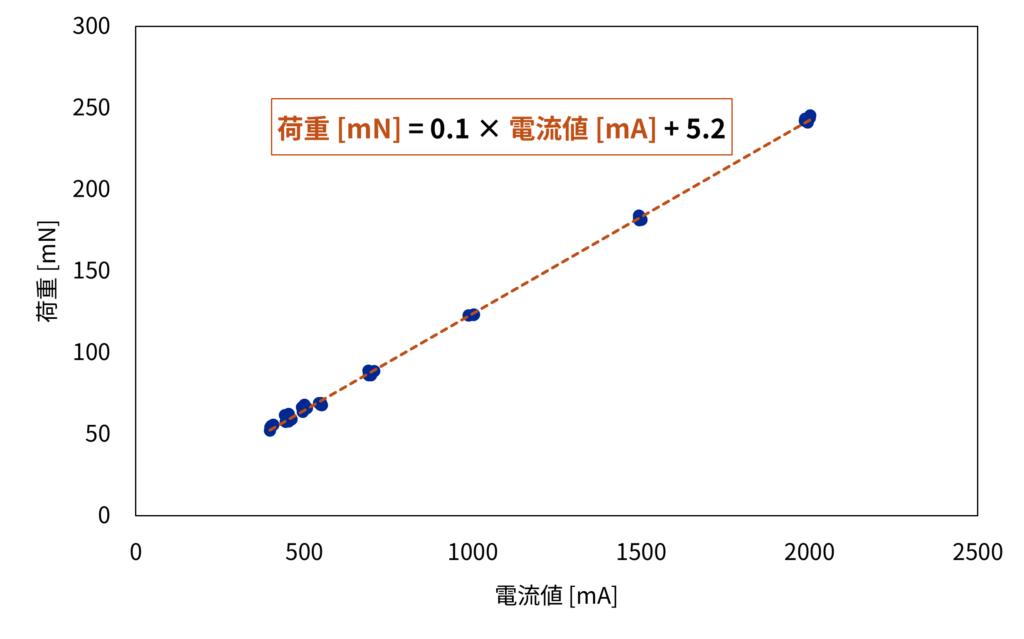
図5 シャフト先端荷重と電流値の関係(MDH-2018-36KE)
MDH-2018-36KEを用いたとき、約5〜24gの範囲で指定荷重を印加した際の誤差は、約1〜2%でした。
外部センサなしでも、微小荷重を高精度に制御可能であることが確認できました。
動画1 ユーザーが指定した荷重をシャフト先端に正確に印加する様子
3.2 接触検知
⑴ 回転中の接触検知
動画2の通り、回転中のシャフトと資料が接触した瞬間を、外部センサなしで検知することができました。
MDH-2018-36KEを用いた場合電流しきい値は平均約150mA、荷重に変換すると約17mNでした。
回転中の接触検知 −実測波形–
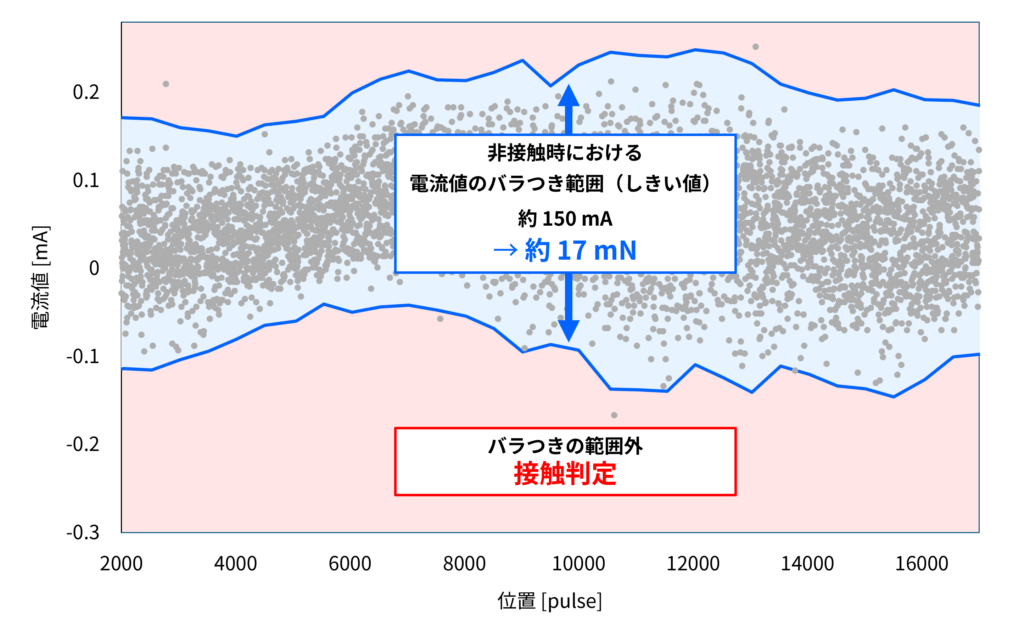
図6 非接触状態でシャフトを回転させた際の電流値とエンコーダの位置の関係(MDH-2018-36KE)
電流値の偏差に加えてエンコーダ位置の窓内変化量(=速度変化)を併用することで、より高感度な接触判定が可能となります。
動画2 低速回転中のシャフトと静止試料(綿)の接触をリアルタイムで検知する様子
⑵ 静止中の接触検知
動画3の通り、静止保持しているシャフトに試料が接触した瞬間を、外部センサなしで検知することができました。
静止保持中はコキングや摩擦に由来する電流のバラつきがないため、回転時よりしきい値が下がり、より高感度な検知が可能となります。
MDH-2018-36KEでは、しきい値が荷重 約12mN・変位 約6μmと、回転時と比べて約30%低下し、羽が触れる程度の極めて軽い接触まで検知できました。
動画3 静止中のシャフトと試料(羽)の接触を、リアルタイムで検知する様子
モータ機種と検知しきい値の関係について
MDH-2018-36KEとMDH(12)-4006-324KEで、接触検知のしきい値を比較した結果を図7に示します。
MDH-2018-36KEは等価トルク定数(Kt)が比較的小さく、単位電流あたりのトルクが小さいため、シャフト先端に加わった微力力を電流変化としてリアルタイムに捉えることができます。
また、電流ノイズもy良い際ため、しきい値がシャフト静止時 約12mN・回転時 約17mNと低くなり、高感度な接触検知が可能です。
一方、MDH(12)-4006-324KEはKtが大きいため、外力に対する電流変化が小さく、しきい値は静止時 約92mN・回転時 約143mNと高くなります。
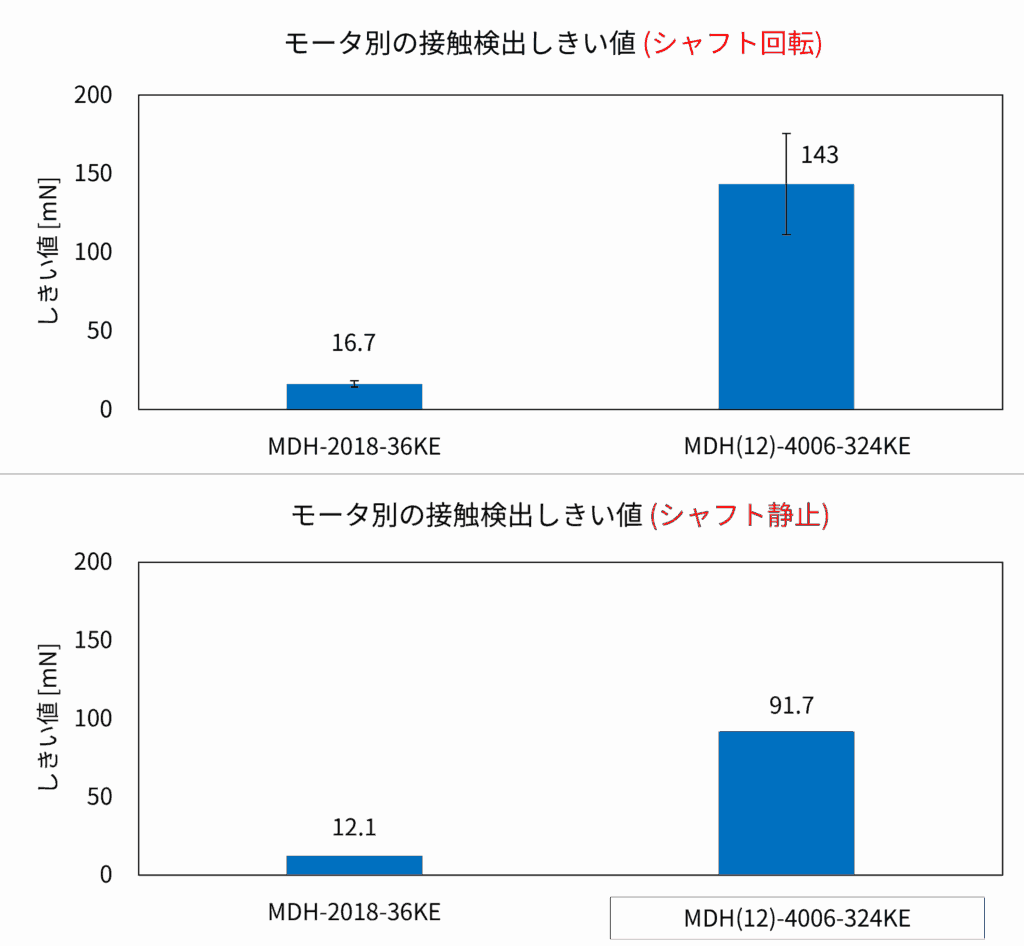
図7 モータ機種別 接触検知しきい値の比較(MDH-2018-36KE / MDH(12)-4006-324KE)
3.3 押し込み剛性の測定
動画4の通り、スポンジなどの柔らかいサンプルに対して見かけの押し込み剛性を定量的に比較することができました。
外部センサを追加することなく試料の柔らかさを比較できるため、正常品・不良品の検査など生産現場や品質管理・研究開発工程への応用が期待されます。
動画4 異なる柔らかさのサンプル(スポンジ)の押し込み剛性を測定・比較する様子
3.4 代表値一覧
MDH-2018-36KEを用いた代表条件における測定結果を表1に示します。
| 評価項目 | 代表値 |
| 押し込み荷重の制御 | 誤差 約1〜2%(荷重範囲:約50mN〜) |
| 回転中の接触検知 | 約17mN |
| 静止中の接触検知 | 力:約12mN 変位:約6μm(シャフトレバー長L=140mm換算) |
4. 応用例
- ロボットハンドの把持力制御
卵や果物を潰さず付けむための接触検知、荷重推定 触覚センサレスハンドの制作に。 - コネクタ挿入・組み立て工程
コネクタが斜めに入ってしまうという作業時の課題解決に。接触時の電流変化を監視。 - 半導体・電子部品の接触確認
プローブ接触や基板検査など接触検知をセンサレスに。 - スポンジ、ゴムなどの材料の剛性評価
センサレスでの剛性検査に。パッケージングの密閉検査など、自動良否検査にも。 - 配管・曲面追従
一定のトルク出力、高バックドライバビリティにより研磨、洗浄などの押し付ける制御が可能
5. まとめ
MTLのDDモータは、駆動源としてだけでなく、接触や変位を捉えるセンサ(接触検知・試料の押し込み剛性測定など)としても活用することができます。
外部センサを必要としないため、装置の小型化・低コスト化・メンテナンス性の向上が期待されます。









